2026-08-04 04:00:09
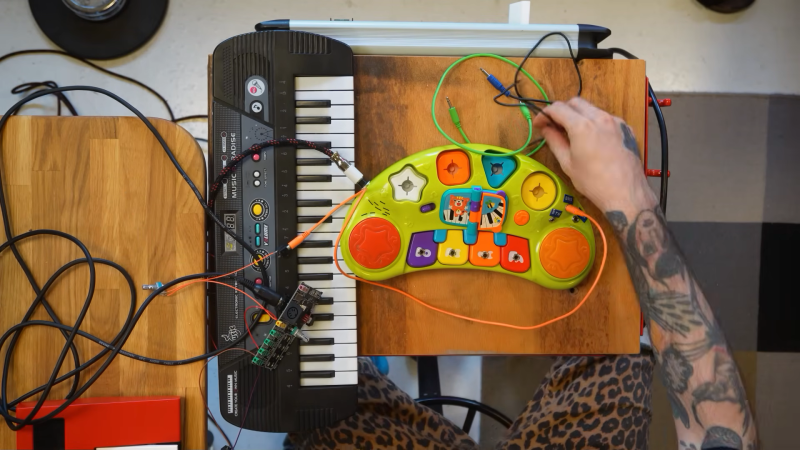
Circuit bending is a chaotic art. At its simplest, it can just involve making connections between random points on a circuit board to create weird sounds in musical hardware. Or, you can complicate things, get really specific with your hookups, and twist them with various sorts of modulation. [Simon the Magpie] has been working on something closer to the latter category, with his neat project to add MIDI to the circuit bending world.
The concept is straightforward enough. [Simon] has created a device that you place in line with your circuit bent connections, particularly those that create pitch bends with pots thanks to their variable resistance. You can then play your MIDI keyboard, and the device will vary the resistance in the circuit and bend the pitch at your command. [Simon] simply calls the device MIDI TO RESISTANCE, because that’s… precisely what it does, with the aid of a digital potentiometer. He then demonstrates it doing its thing on pitchbent toys, and it sounds pretty radical in use.
If you’re trying to make your circuit bent toys and instruments more musical, this build should serve as a great inspiration. We’ve featured other oddball musical hacks in a similarly creative vein before, too—such as using mixers as a synthesizer in their own right. Have fun out there.
2026-08-04 02:30:16

[David] has a young child who is clever enough to use a computer to play music, but he doesn’t quite want to hand over the mouse just yet. Thus, he set about building an electronic music player that could be operated in an altogether simpler fashion.
The build is based around an Arduino Nano — its job is to read RFID tags via an RC522 reader, with the tags themselves embedded in a series of small dolls belonging to [David]’s daughter. Upon reading the tag, the Arduino Nano chats over serial with a DFPlayer Mini module, which reads a playlist of MP3 files off of an SD card and plays them over a small 4 ohm speaker that [David] had laying around. It’s a simple build, with the components all neatly wrapped up in a handsome wooden case with a volume control and a skip button for if any one song becomes too annoying for a repeat listen.
We’ve featured other builds in this vein before, too. There’s something satisfying about a music player with such a simple interface—no delicate media to fiddle with, just pop the toy on top and get the playlist you were looking for. If you’re creating your own little musical builds at home, we’d love to see them on the tipsline.
2026-08-04 01:00:43

Apparently you all love lasers just as much as we do. We put out a challenge to use, build, or otherwise abuse our favorite coherent light sources, and you responded. Some of the projects had been in the works for quite a while and were ridiculously polished, some were whipped together on the fly just for the contest, and we truly enjoyed both.
We only have three $150 DigiKey gift certificates to give out, though, so without further ado, we present to you…
 Our judges’ favorite project was [Jacob]’s CubeRaman, and it’s not hard to see why. A Raman spectrometer shines laser light at an object and catches the reflection, filtering all of the original laser wavelength out. What remains are photons that have interacted with electrons in the atoms that make up the target itself, and come back at a shifted wavelength. Comparing the spectrum of this Raman reflection with a database of known spectra tells you what it is made of.
Our judges’ favorite project was [Jacob]’s CubeRaman, and it’s not hard to see why. A Raman spectrometer shines laser light at an object and catches the reflection, filtering all of the original laser wavelength out. What remains are photons that have interacted with electrons in the atoms that make up the target itself, and come back at a shifted wavelength. Comparing the spectrum of this Raman reflection with a database of known spectra tells you what it is made of.
This is by no means an easy project, but [Jacob]’s documentation, careful selection of parts to buy used and parts to build, coupled with a clever 3D-printed mounting system make it plausible for the home gamer. We love seeing out-of-reach science gear brought into reach, and we know we’ll be keeping an eye on this project in the future.
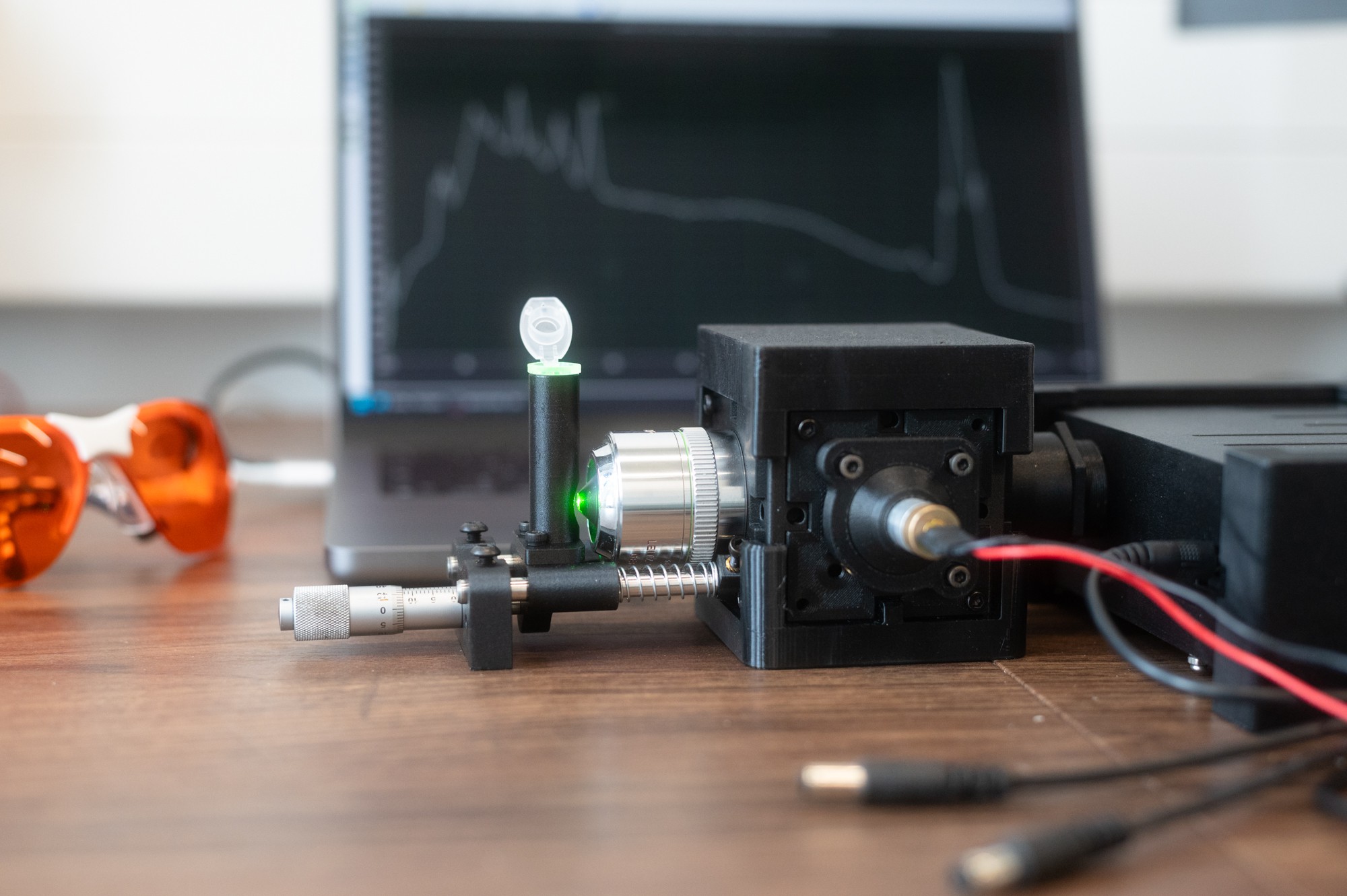
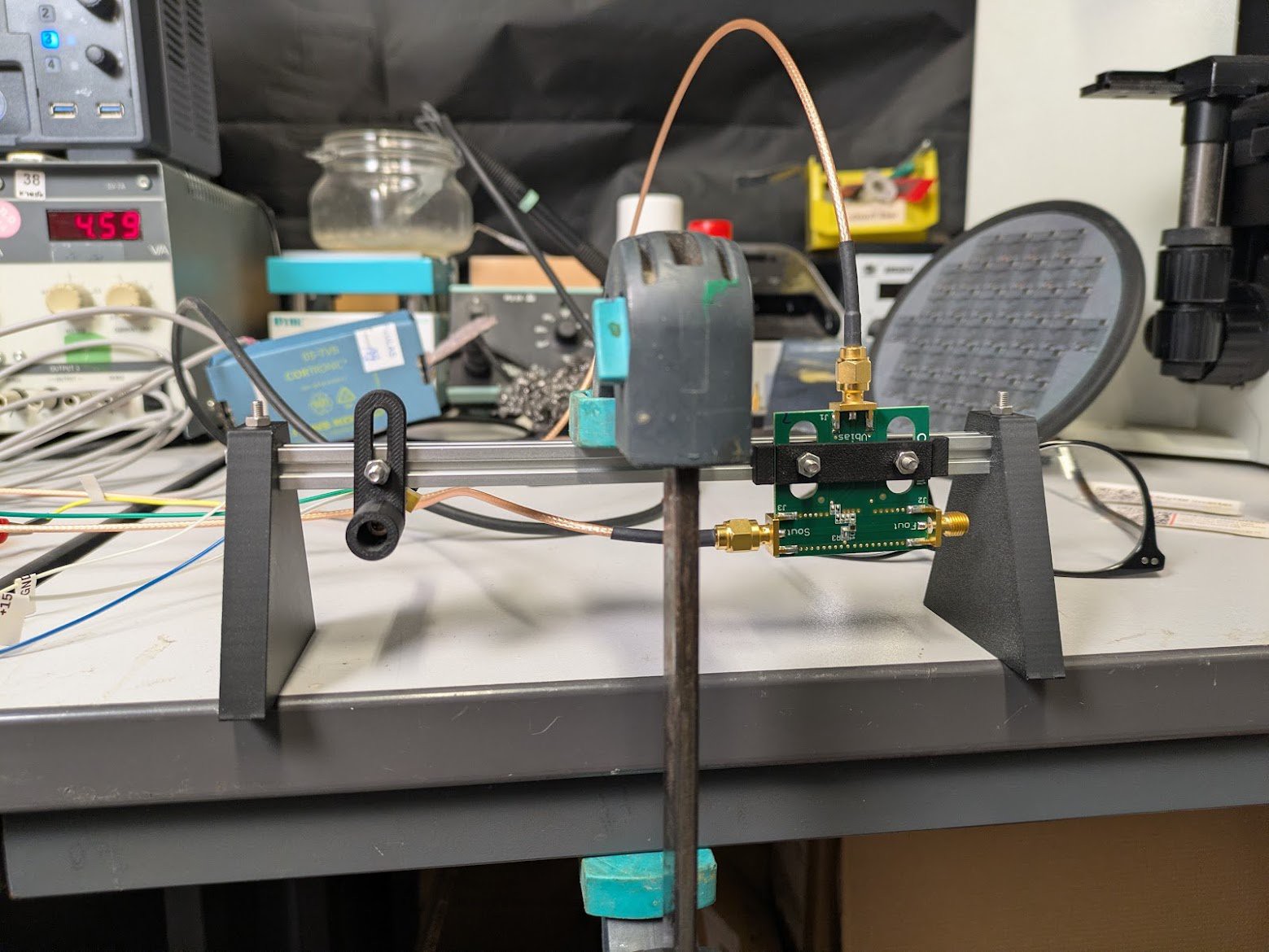
 Next up, we had [Kyle Mayer]’s Measuring Microns with Lasers, which is a DIY laser rangefinder, but for measuring very small distances — under a centimeter — with precision. Like many laser optical rangefinders, this bounces a laser off the target and collects the light on a line sensor, using the angle at which the light returns to figure out how far the target is.
Next up, we had [Kyle Mayer]’s Measuring Microns with Lasers, which is a DIY laser rangefinder, but for measuring very small distances — under a centimeter — with precision. Like many laser optical rangefinders, this bounces a laser off the target and collects the light on a line sensor, using the angle at which the light returns to figure out how far the target is.
[Kyle]’s implementation uses three of these measurement heads and produces a reading that is precise down to 0.25 μm nearly 5,000 times per second. This puts it in league with devices that you have to request a quote for, so you probably don’t want to have to afford them.
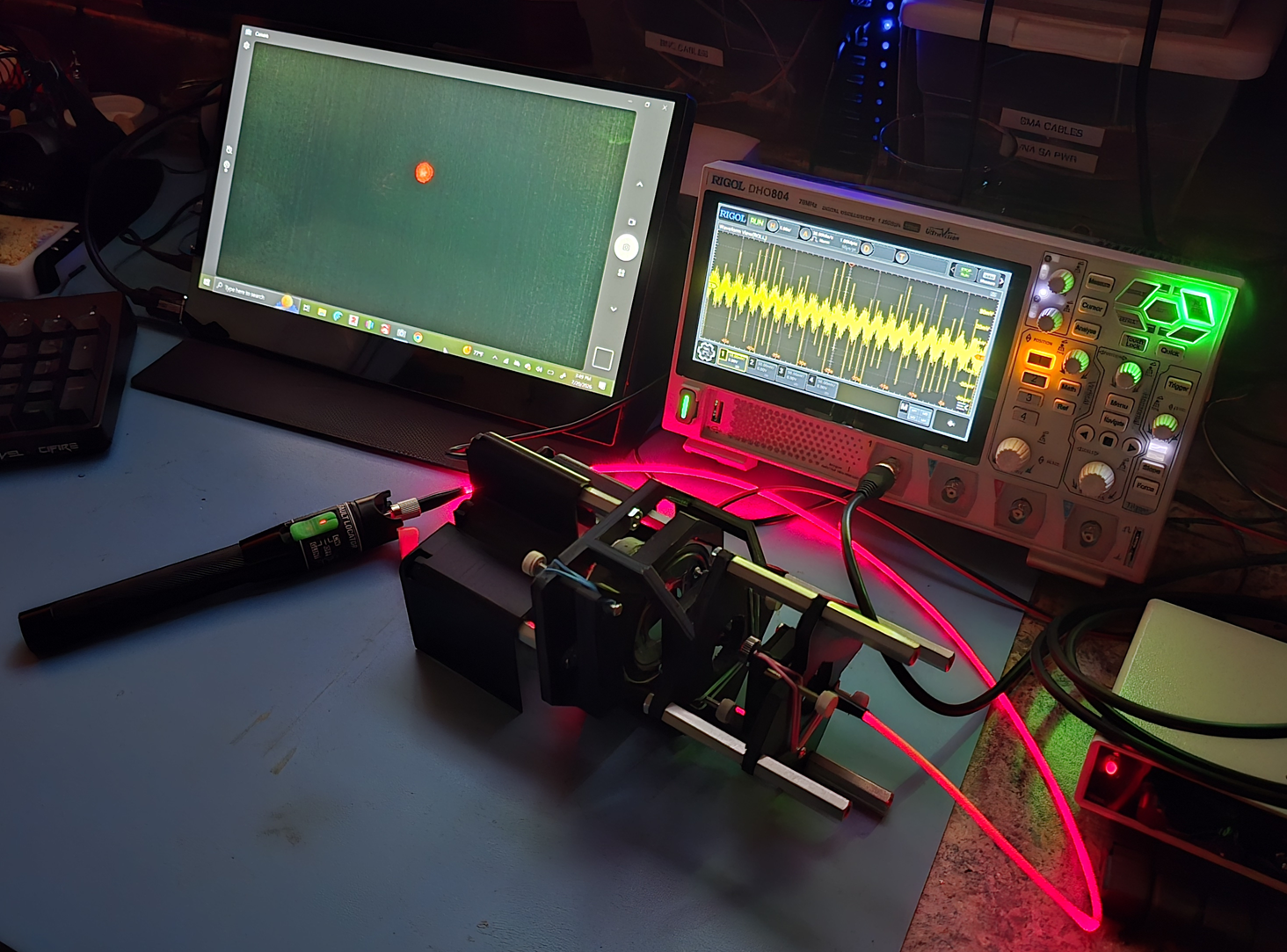
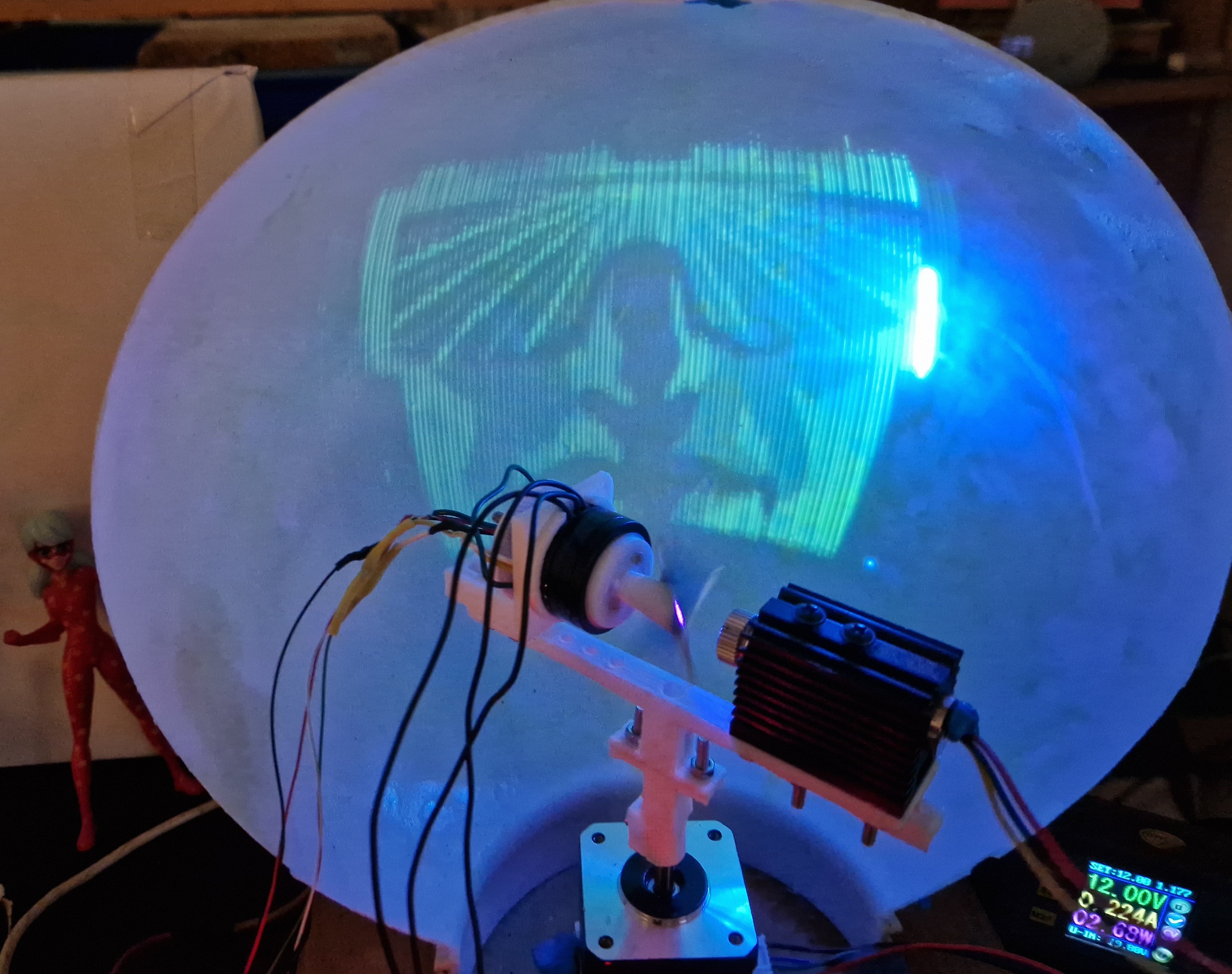 And finally, an art project! [AJRussell]’s Glow Engine is a beautiful take on a familiar laser trick: shining a blue laser at glow-in-the-dark materials to leave persistent traces. Scan the laser over the phosphorescent screen, and you have something like a CRT, only in [AJ]’s case, a very very slow CRT.
And finally, an art project! [AJRussell]’s Glow Engine is a beautiful take on a familiar laser trick: shining a blue laser at glow-in-the-dark materials to leave persistent traces. Scan the laser over the phosphorescent screen, and you have something like a CRT, only in [AJ]’s case, a very very slow CRT.
The beauty here lies in the details. [AJ] chose high quality strontium aluminate for the glowing, and used high resolution encoders and the open-source SimpleFOC motor driver firmware to get the spots in the right place. Snippets of old hard drive platters make fantastic mirrors. All in all, a super implementation that we’re pretty sure looks even better in the real world.
We always come up with a few honorable mention categories to give you all some inspiration. And it also gives us a nice excuse to feature some more sweet projects.
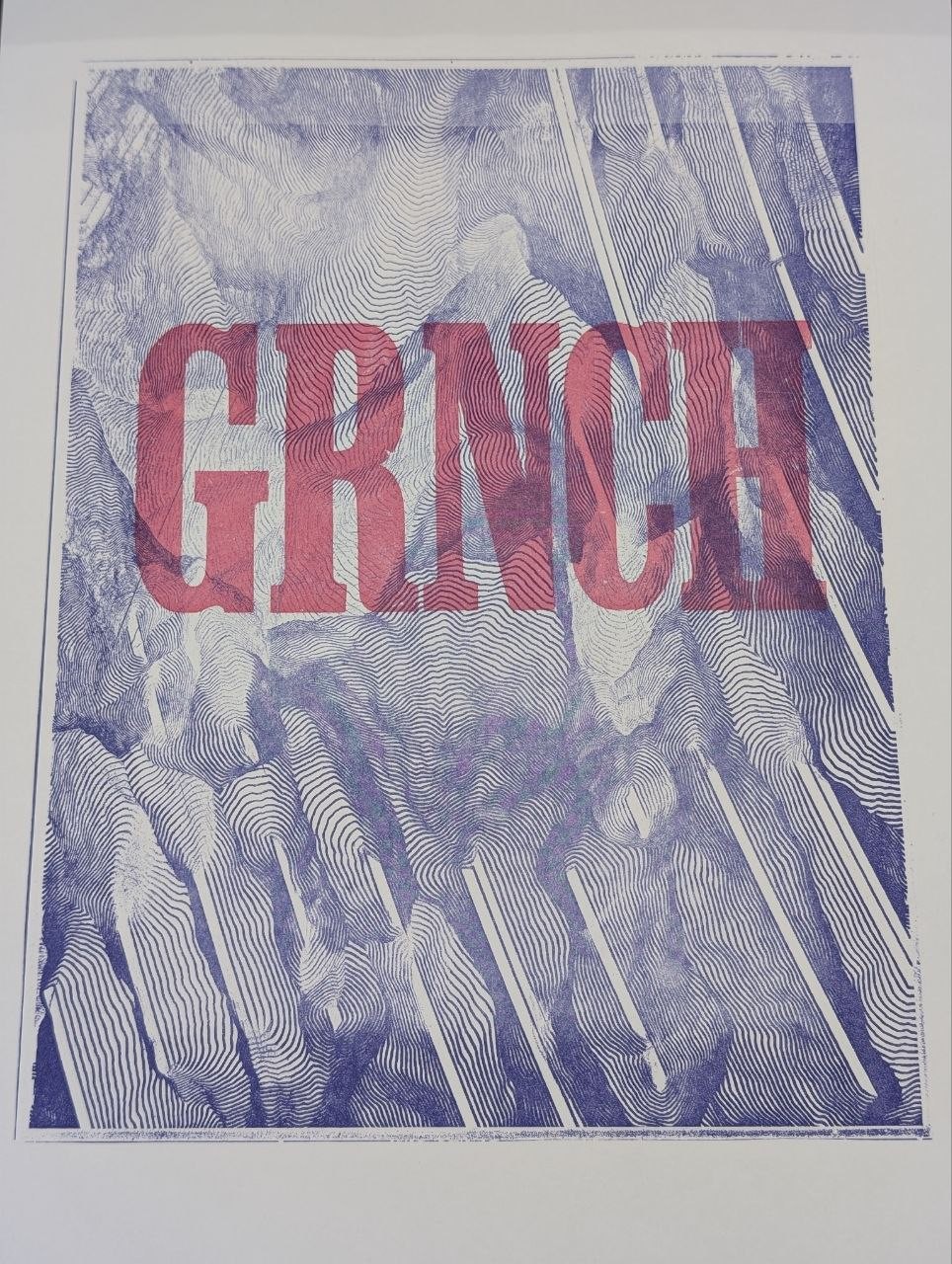
We wanted to see pretty displays of laser light. [Daniel Ross]’s Laser Oscilloscope 360 not only draws out pretty waveforms, but it does so in prime steampunk style. Both [Owen Trueblood]’s Laser Cyanotypes and [GRNCH]’s Scored: Laser Woodblock Prints flip the script, making beautiful images from lasers, but not the way we intended. Kudos.
We wanted to see what laser-involved projects you were building yourselves, from scratch. While we were shocked that we had no TEA laser entries, [Armin Bindzus]’s Versatile Laser Processing Machine more than made up for it. It’s a pulsed-laser do-everything machine that we’re absolutely jealous to see made real. And if you don’t think there’s some real laser DIY going on here, you’ve never maintained a q-switched diode pumped Nd:YAG laser.
This was our catch-all category for doing basically anything else with lasers. It turns out that what you all mostly wanted to do was science. [Matt Venn] used a fast-rise-time laser driver to Measure the Speed of Light at Home, and got damn good results considering the 2 m baseline. [Tim] put together a 3D Printed Optical Cavity interferometer on a budget.
But it wasn’t all labcoats and pocket protectors. [WeldingRod1]’s Laser Bandsaw is basically as bad an idea as it sounds like it is. Please, please wear eye protection!



Thanks again to DigiKey for sponsoring the contest. We’re sure that our winners will find whatever they need for their next laser project.

2026-08-03 23:30:32
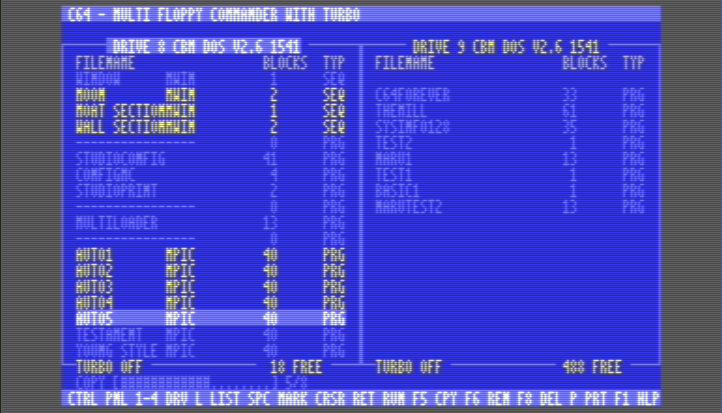
Norton was always a PC company — Norton Commander, the file manager that launched a thousand clones, was only ever available for DOS, like the rest of the company’s offerings in those days. If they’d decided to port it to the C64, though, it would likely look a lot like [retro3872809] aka [Chicken 64]’s Multi Floppy Commander with Turbo, available on GitLab.
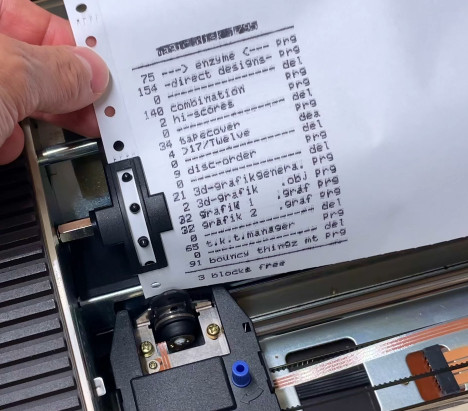 As you might be able to see on the screen shot above or in the demo video below, the application provides an 80-column interface with a split view to show a pair of floppies side-by-side. Not that you’re limited to two floppies, however. The software is happy to swap between all the drives on the bus, to the C64’s maximum of four. All four drives will be usable since the file manager lives on a cartridge.
As you might be able to see on the screen shot above or in the demo video below, the application provides an 80-column interface with a split view to show a pair of floppies side-by-side. Not that you’re limited to two floppies, however. The software is happy to swap between all the drives on the bus, to the C64’s maximum of four. All four drives will be usable since the file manager lives on a cartridge.
All drive models are supported, though not all have turbo. As a file manager, it looks like it has the normal functionality you’d expect: renaming, copying, moving and deleting files and directories. You can also launch programs or print disk listings, assuming you have a printer attached to your Commodore.
Said Commodore perhaps needn’t be vintage, as they’re selling new ones again, but if you want a disk drive you may have to fix it yourself.
2026-08-03 22:00:45

You may have a 4K television. Perhaps you have even bought an 8K screen, despite the shortage of things worth watching in 8K. A 16K display is, today, a rarity. But even when those eventually become commonplace, yours probably will not cover 14,900 square meters, rise 73 meters into the air, or wrap over your head and behind your peripheral vision.
That is approximately what happens inside Sphere in Las Vegas. The venue’s interior display is quoted as having a resolution of 16K by 16K and an area of 160,000 square feet, or about 3.7 acres. Unlike most enormous movie screens, it is not illuminated by a projector. The entire surface is a direct-view LED display: an immense, curved video wall assembled from tens of thousands of smaller pieces.
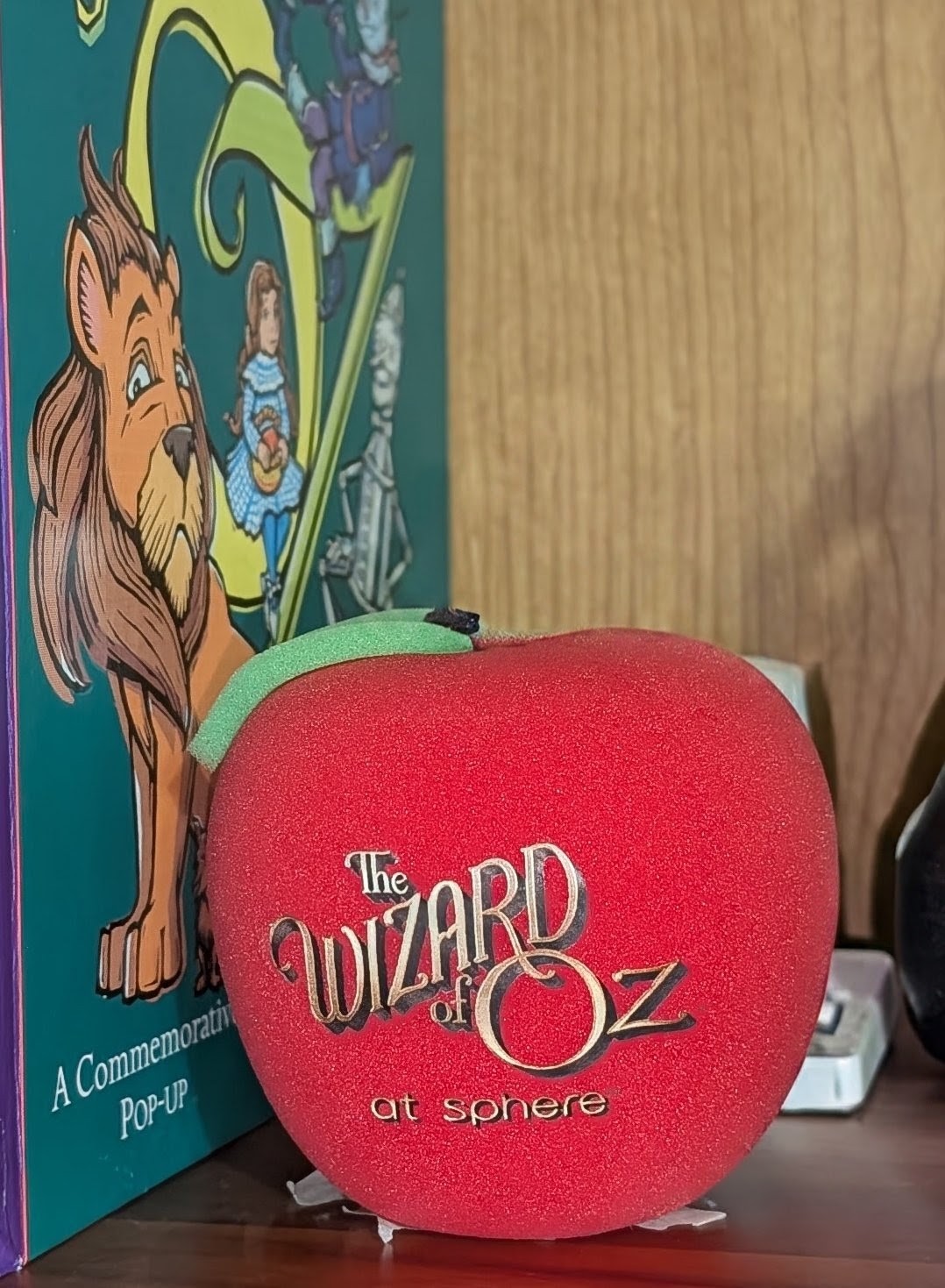
After seeing The Wizard of Oz at Sphere, however, the most interesting part was not simply the screen’s size. It was how thoroughly the screen could disguise itself.

The obvious first conclusion was that the LED surface must be optically transparent, allowing the audience to see the real roof behind it until the pixels illuminated. That explanation was attractive because Sphere’s audio system really is installed behind the display, and the surface must allow sound through it.
It was also, apparently, wrong. The only explanation that makes sense is that the ceiling, ribs, grilles, speakers, and monitors were already being displayed by the screen. It was like a holodeck impersonating a physical theater interior. When the Oz material began, the system simply replaced one complete visual environment with another.
That’s what happens when a display fills nearly all of your useful visual field. A normal screen announces itself with a bezel, a wall, or at least a clearly visible edge. Sphere’s display extends upward and around the audience, removing many of those references. Give the image credible perspective, texture, shadows, and familiar architectural details, and the brain accepts the pixels as a room.
The same effect makes the Oz landscapes seem less like scenes displayed in front of the audience and more like places into which the auditorium has been inserted. Of course, there are more special effects. For The Wizard of Oz, there is wind and smoke, along with paper leaves, flower petals, and foam-rubber apples that fall from the sky. All of this makes it even more immersive.
Calling it “16K” is not exactly untruthful, but potentially misleading. Consumer display resolutions normally describe a rectangular raster. A 4K UHD television has 3840 by 2160 pixels, or about 8.3 million pixels. An 8K set has four times as many, at roughly 33 million.
A literal 16,384-by-16,384 image contains about 268 million picture locations, but that’s not how Sphere is built. Sphere describes its interior display plane as 16K by 16K, but that does not mean it is equivalent to a square desktop monitor with a neat, uniformly spaced Cartesian grid. It is a custom media surface with complex curvature and geometry, driven as one enormous canvas.
Sphere says the screen reaches 240 feet high and wraps up, over, and around the audience. SACO, the company responsible for the LED technology, describes the interior as the world’s highest-resolution LED screen and says it has more than 120 times the resolution of an HDTV.
Published numbers vary slightly depending on the source. One source describes approximately 64,000 SACO LED tiles, while structural contractor Seele refers to approximately 65,000 LED screens or frames. The difference may be terminology, rounding, or the boundary between the LED tile and its mechanical carrier. Either way, this is clearly not a single panel that arrived in the world’s largest shipping crate, but rather was built on-site.
The surface is assembled onto a precisely engineered secondary structure. Seele says it created 839 facet units containing approximately 45,500 custom structural components. Those facets establish the overall geometry and give the LED hardware suitable mounting points while maintaining alignment across the enormous screen wall.
In other words, the apparent smooth curve is made from many accurately positioned pieces. At the intended viewing distance, the facets and individual emitters merge into a continuous image.
Building the display is only half the problem. The other half is getting a quarter-billion-pixel-class image onto it up to sixty times per second without tearing, losing synchronization, or pausing while somebody clears a buffering dialog.
The public description of the playback chain resembles a broadcast plant crossed with a high-end video wall. Pre-rendered content is kept on network-attached storage and streamed to dozens of 7thSense media servers. Each server produces 4K video at 60 frames per second, with the streams distributed using the SMPTE ST 2110 professional-media-over-IP standards. Pixel processors drive the appropriate regions of the display.
Hitachi Vantara says the storage system can deliver data at up to 400 GB/s with less than five milliseconds of latency. (At least it did for Postcard from Earth; it could be capable of more, for all we know.) The material is handled using 12-bit color and uncompressed 4:4:4 chroma sampling. That does not necessarily mean every show continuously consumes the maximum quoted bandwidth, but it provides some sense of the infrastructure needed to treat the whole venue as a dependable display rather than an interesting laboratory experiment.
Content also has to be geometrically transformed for the screen. An image that looks correct on a flat monitor would be badly distorted if copied directly onto the curved surface. The production pipeline therefore needs a detailed model of the display and the audience’s relationship to it.
The Wizard of Oz presents an additional problem: the 1939 film was photographed for a nearly square 1.37:1 frame. Sphere’s interior is absolutely not 1.37:1 or even close.
Simply magnifying the original would waste most of the display. Cropping it to fill the screen would remove the actors and much of the composition. Instead, Sphere Studios expanded the film’s world beyond the photographed frame, using Google AI tools along with conventional restoration, compositing, animation, and visual-effects work.
The original photography remains central to the presentation, but scenery, skies, crowds, buildings, and environmental details extend far outside the old frame. Sphere says the project used AI to enhance characters and expand scenes while attempting to preserve the performances and familiar imagery.
This is more complicated than expanding a still photograph. The additions must remain temporally consistent as the camera and characters move. A tree cannot change shape from frame to frame, and a newly invented Munchkin cannot grow an extra arm whenever the model becomes distracted. The generated material also has to survive at extraordinary scale, where a small artifact can become several meters wide.
Whatever one thinks about altering a classic film, it is difficult to imagine adapting this particular source material to this particular display without reconstructing substantial portions of the unseen world.
Of course, not everyone is thrilled. If you hated colorizing black-and-white movies, this will probably set you off. Even the original Star Trek got new digital effects.
With roughly 64,000 or 65,000 LED assemblies, failures are inevitable. We couldn’t find much public information about Sphere’s exact maintenance procedure, but we can infer some probable scenarios from other large LED systems. Big systems generally report power, temperature, communications, and controller faults automatically. We would imagine that Sphere can do this, too. Then, technicians can also probably display red, green, blue, white, black, and low-gray test patterns while cameras or human observers look for dead, stuck, or miscalibrated pixels.
A single failed subpixel may be invisible from most seats during moving content. A stuck-bright pixel in a dark sky would be much more conspicuous, as would an entire failed tile or data branch.
Seele says the screen structure includes 229 accessible panels, suggesting that maintenance access was designed into the system rather than left to exceptionally adventurous climbers. A failed field-replaceable assembly could be swapped, repaired on a bench, and returned to the spare inventory.
The replacement would then need calibration. LEDs from different production batches — and LEDs of different ages — do not produce precisely identical brightness or color. A technically functional replacement could appear as a visible rectangle unless the controller corrected its red, green, and blue response, gamma, and low-level output to match its neighbors.
Curiously, this may be one of the hardest features to appreciate during a show: tens of thousands of modules are working together, yet the audience perceives no modules at all.
Sphere’s specifications are impressive, but resolution alone does not explain the experience. Spread 16K pixels across a screen tens of meters high and the pixel density is far below that of a phone. The system works because the pixel pitch, viewing distance, brightness, content, architecture, and human visual system were engineered together using a lot of science.
While the Wizard of Oz was an impressive feat, we hope they’ll bring us something like 2001: A Space Odyssey. Or maybe a triple feature with shorts from Star Trek, Star Wars, and Avatar. Sure, the rights to pull that off would take a team of lawyers, but we can dream, can’t we? What movie would you like to see on a giant screen like Sphere? Or would you only see an original production? Any of you out there work behind the LED curtain?
2026-08-03 19:00:00

Launch a single static binary executable, send someone a QR code or URL (or failing that, text a numerical code or shout it across a room), and they’ll get an encrypted terminal in their browser. No VPN, no port forwarding, no firewall modifications, and no account setup required. It’s BitBang by [Rich LeGrand], and there is a lot to go through in this one.
The best part? It’s not actually limited to just firing off a terminal. It’s a whole open framework for establishing an encrypted peer-to-peer connection between two systems over WebRTC without needing either a trusted central authority, or any special network configuration.
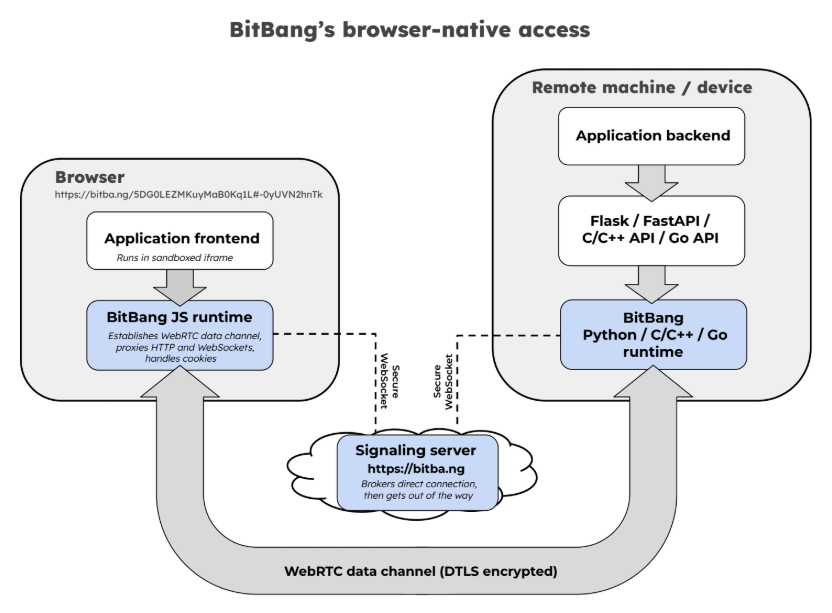
Opening a remote terminal, transferring files, or accessing web apps on a remote machine’s network is done with bitbang-cli, an implementation of BitBang focused on providing simple, zero-config remote access.
Before we go on, we want to mention that BitBang does require a lightweight, trustless signaling server only to broker the initial connection, but more on that in a moment.
On the machine to be shared, one first downloads the binary. Easiest way to do that is to go to bitba.ng and download manually, or copy and paste the one-line installer to auto-detect one’s system, download the correct release, and verify the checksum.
After the binary is downloaded, simply run it in a terminal and receive a QR code to scan, a URL to copy & paste, or a numerical code if those are inconvenient. On the remote side, one accesses the signaling server and the connection is made — one gets a terminal on the target machine open in the browser tab, with added options for file sharing and accessing web applications on the target network.
The signaling server isn’t involved in authentication or encryption, and couldn’t see private data between the two ends even if it wanted to. Prefer not to use someone else’s regardless? Run your own local instance with bitbang-server.
Originally developed as an easy way to securely make telepresence robots reachable over the Internet with nothing more than a QR code, today it’s a whole framework.
It includes not just the remote-access tool mentioned above, but also a BitBang Octoprint plugin for cloud-free remote access to 3D printers, and bitbang-python is a library for turning local Python web applications into a URL that can be opened from anywhere.
We’re sure some of you are getting more than a few ideas from this. If it lets you bring a project over the finish line, let us know on our tips line.